臺州智能搬運機械手
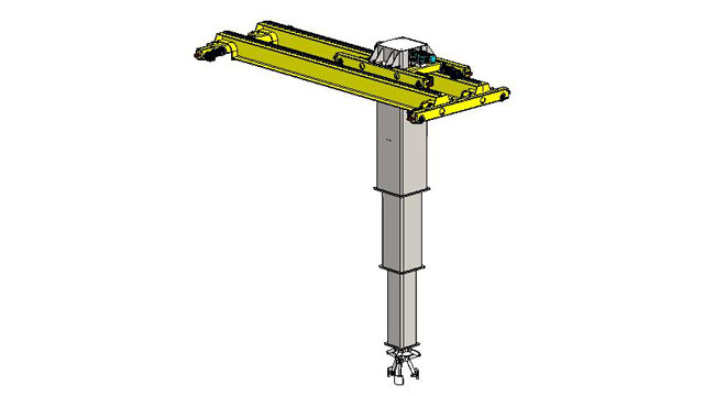
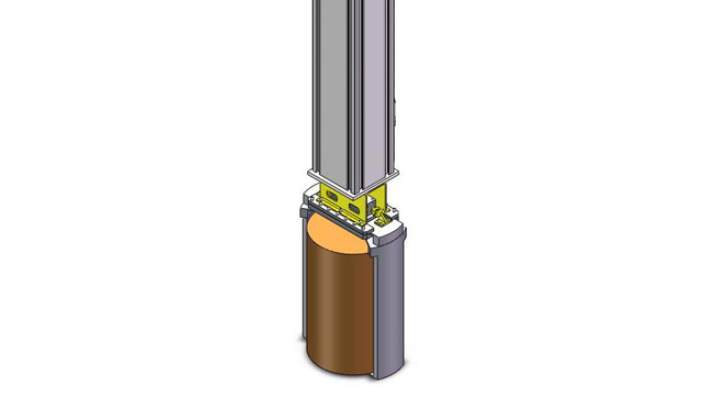
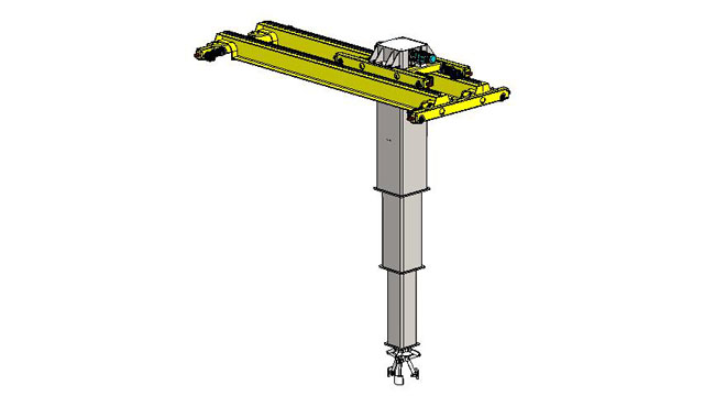
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。 二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運; 5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。三、搬運機械手產品構成:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成;X軸方向運行機構,采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構,采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構,采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現機械手的開閉,爪指采用內爪式,傳感器檢測元件+機械限位;控制系統,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發送指令給個執行元件按既定動作去執行。南京搬運機械手,南京高銳特有限公司。臺州智能搬運機械手
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。 二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。臺州智能搬運機械手三坐標搬運機械手,氣動抓手,PLC控制。南京高銳特起重機械有限公司生產。
一、 搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。三、搬運機械手產品構成:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成;X軸方向運行機構,采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構,采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構,采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現機械手的開閉,爪指采用內爪式,傳感器檢測元件+機械限位;控制系統,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發送指令給個執行元件按既定動作去執行。
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。 二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置; 6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。三、搬運機械手產品構成:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成;X軸方向運行機構,采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構,采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構,采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現機械手的開閉,爪指采用內爪式,傳感器檢測元件+機械限位;控制系統,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發送指令給個執行元件按既定動作去執行。三坐標搬運機械手,PLC控制,性能好。
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。 二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。 三、搬運機械手產品構成:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、 Z軸升降機構、 抓取機械手、導電系統及控制系統等組成;X軸方向運行機構,采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構,采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構,采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現機械手的開閉,爪指采用內爪式,傳感器檢測元件+機械限位;控制系統,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發送指令給個執行元件按既定動作去執行。三坐標搬運機械手,自動化程度高,南京生產。銷售搬運機械手廠家
三坐標搬運機械手,PLC控制。南京生產。臺州智能搬運機械手
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。 二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。 三、搬運機械手產品構成:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成;X軸方向運行機構,采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構, 采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構,采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現機械手的開閉,爪指采用內爪式,傳感器檢測元件+機械限位;控制系統,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發送指令給個執行元件按既定動作去執行。臺州智能搬運機械手
本文來自陜西百越產品設計有限公司:http://www.honghecn.cn/Article/33a91599051.html

山西鋁合金模板配件
鋁合金模板背楞的尺寸和承載能力直接影響到施工效率和成本。在選購時,要根據實際工程需求選擇合適的尺寸和承載能力。一般來說,尺寸較大的背楞適用于大型工程項目,而尺寸較小的背楞則適用于中小型項目。此外,還要 。
車間地坪是工業生產環境中的基礎設施,其性能要求主要包括以下幾點:1.?耐磨性:車間內常有機械設備和人員的頻繁活動,地坪需要具有良好的耐磨性,以保證長期使用不損壞。2.?耐腐蝕性:車間內可能接觸到各種腐 。
牧野加工中心的服務范圍主要包括以下幾個方面:技術咨詢與支持:牧野加工中心為客戶提供全方面的技術咨詢服務,包括產品選型、加工方案設計、操作培訓等,確保客戶能夠充分利用其產品的優勢。售后服務:牧野加工中心 。
1、網購食品包裝設計存在的問題包裝存在資源浪費由于快遞行業的飛速發展,每年的大量快遞包裝所造成的污染給環境造成了極大的壓力。為了節約成本,部分網購商家選擇質量較低的包裝材料,同時兼顧物流運輸過程中可能 。
磁性復合材料在磁性存儲技術中扮演著至關重要的角色。隨著科技的不斷進步,磁性存儲技術也在迅速發展,磁性復合材料在此領域的應用也日益普遍。磁性復合材料由磁性顆粒和基體組成,具有優異的磁性能和機械性能。在磁 。
線上無償辦理流量卡套餐的流程一般為:1、找到一家靠譜的流量卡套餐網站,申請適合自己的流量卡套餐2、申請時用戶需要填寫個人資料姓名、身份證信息、郵寄地址等)3、運營商進行審核,審核成功郵寄流量卡套餐,審 。
財務軟件的價值在于它可以幫助企業實現財務數據的自動化處理,從而提高財務數據的準確性和可靠性。財務軟件可以自動化地處理企業的財務數據,包括會計核算、財務報表、成本管理、預算管理、資產管理等方面,減少了人 。
辦公室租賃的考慮因素。地理位置:在選擇租賃辦公室時,地理位置是非常重要的。應考慮辦公室是否位于商業區、工業區或住宅區。同時,辦公室的周圍環境,如交通是否便利、是否有足夠的停車位等,也是需要考慮的因素。 。
存儲不銹鋼帶需要注意哪些事項?1. 維護干燥環境:不銹鋼帶的存儲環境應干燥、通風、無明火。鐵屑、防水膜、細顆粒的灰塵等雜質應去除干凈。因為長時間放在潮濕環境下,不銹鋼帶的表面容易出現氧化及腐蝕,影響其 。
下面就是送料機常見問題和相應的解決方法。送料機送完料不報警或者提前報警,原因:1、壓力不夠 2、料管位置不對 3、電機是否正常工作,對策:1、檢查油量 2、稍移動料管 3、檢查線路。危險——可能導致嚴 。
智能碾米機的投放選址建議是菜市場、糧油店、水果店、小區、超市等生活場景。根據投放選址的不同提供不同價位的稻谷。主要從選址的消費人群的年齡,購買力等關鍵因素出發,適配不同的產品。由于自古以來人們吃的都是 。